Na tę stronę wskazuje przekierowanie z „rzut ortogonalny”. Zobacz też: rzut prostokątny w geometrii elementarnej.
Rzut lub projekcja [a] idempotentny endomorfizm liniowy określony na danej przestrzeni liniowej, czyli operator liniowy zachowujący swój obraz, tzn. dla którego każdy element obrazu jest punktem stałym tego przekształcenia.
Rzuty/projekcje ortogonalne są uogólnieniem pojęcia rzutu prostokątnego z geometrii euklidesowej (zob. osobna sekcja ); w przestrzeniach unitarnych (tzn. z iloczynem skalarnym, np. przestrzeniach euklidesowych) są to ni mniej, ni więcej operatory samosprzężone .
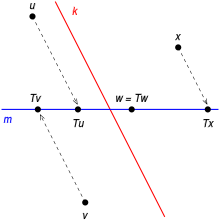
Rzut ukośny Rzut T {\displaystyle \mathrm {T} } k {\displaystyle k} m . {\displaystyle m.} Niech dana będzie przestrzeń liniowa V {\displaystyle V} Przekształcenie liniowe P : V → V {\displaystyle \mathrm {P} \colon V\to V} warunek idempotentności
P 2 = P , {\displaystyle \mathrm {P} ^{2}=\mathrm {P} ,} czyli P ( P ( v ) ) = P ( v ) {\displaystyle \mathrm {P} {\big (}\mathrm {P} (\mathbf {v} ){\big )}=\mathrm {P} (\mathbf {v} )} v ∈ V {\displaystyle \mathbf {v} \in V} rzutem (ukośnym) lub projekcją .
Odwzorowanie P {\displaystyle \mathrm {P} } v ∈ V {\displaystyle \mathbf {v} \in V} v = w + u , {\displaystyle \mathbf {v} =\mathbf {w} +\mathbf {u} ,} w ∈ ker P {\displaystyle \mathbf {w} \in \ker \mathrm {P} } u ∈ i m P {\displaystyle \mathbf {u} \in \mathrm {im\;P} } [b] V = ker P ⊕ i m P , {\displaystyle V=\ker \mathrm {P} \oplus \mathrm {im\;P} ,} V {\displaystyle V} sumą prostą jądra i obrazu P . {\displaystyle \mathrm {P} .} V {\displaystyle V} U {\displaystyle U} twierdzenia o rzędzie istnieje rzut P , {\displaystyle \mathrm {P} ,} i m P = U {\displaystyle \mathrm {im\;P} =U} 0 < dim U < dim V , {\displaystyle 0<\dim U<\dim V,} V {\displaystyle V} U {\displaystyle U}
Dla danych podprzestrzeni W , U {\displaystyle W,U} V {\displaystyle V} V = W ⊕ U {\displaystyle V=W\oplus U} P : V → V {\displaystyle \mathrm {P} \colon V\to V} rzutem na U {\displaystyle U} W , {\displaystyle W,} v ∈ V {\displaystyle \mathbf {v} \in V}
P ( v ) ∈ U {\displaystyle \mathrm {P} (\mathbf {v} )\in U} v − P ( v ) ∈ W . {\displaystyle \mathbf {v} -\mathrm {P} (\mathbf {v} )\in W.} Jedynymi wartościami własnymi rzutu są zero i jedynka, tzn. widmo rzutu P {\displaystyle \mathrm {P} } σ ( P ) = { 0 , 1 } {\displaystyle \sigma (\mathrm {P} )=\{0,1\}} [c] [d] A {\displaystyle \mathrm {A} } σ ( A ) = { 0 , 1 } {\displaystyle \sigma (\mathrm {A} )=\{0,1\}} A {\displaystyle \mathrm {A} } [e]
Jeśli P {\displaystyle \mathrm {P} } U {\displaystyle U} W , {\displaystyle W,} Q = I − P : V → V {\displaystyle \mathrm {Q} =\mathrm {I} -\mathrm {P} \colon V\to V} Q ( v ) = v − P ( v ) {\displaystyle \mathrm {Q} (\mathbf {v} )=\mathbf {v} -\mathrm {P} (\mathbf {v} )} W {\displaystyle W} U {\displaystyle U} [f] V = U ⊕ W {\displaystyle V=U\oplus W} P , Q . {\displaystyle \mathrm {P} ,\mathrm {Q} .}
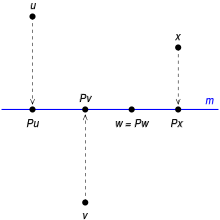
Rzut ortogonalny Rzut ortogonalny P {\displaystyle \mathrm {P} } m . {\displaystyle m.} Jeżeli P {\displaystyle \mathrm {P} } U {\displaystyle U} W {\displaystyle W} V = W ⊥ U {\displaystyle V=W\perp U} ortogonalną sumą prostą , to P {\displaystyle \mathrm {P} } rzutem ortogonalnym (na U {\displaystyle U} W {\displaystyle W} W = U ⊥ {\displaystyle W=U^{\perp }} dopełnieniem ortogonalnym U , {\displaystyle U,} V = U ⊥ ⊕ U , {\displaystyle V=U^{\perp }\oplus U,} V = ( i m P ) ⊥ ⊕ i m P , {\displaystyle V=(\mathrm {im\;P} )^{\perp }\oplus \mathrm {im\;P} ,} ker P = ( i m P ) ⊥ , {\displaystyle \ker P=(\mathrm {im\;P} )^{\perp },} i m P {\displaystyle \mathrm {im\;P} } ker P {\displaystyle \ker \mathrm {P} } P . {\displaystyle \mathrm {P} .}
Konstrukcja ortogonalnej sumy prostej wymaga istnienia (niezdegenerowanej) symetrycznej formy dwuliniowej określonej na przestrzeni (tzw. przestrzeń ortogonalna ): zwykle rozważa się przestrzenie z iloczynem skalarnym (tzw. przestrzenie unitarne ); w przypadku przestrzeni nieskończonego wymiaru zakłada się dodatkowo zupełność , co sprawia, że przestrzeń unitarna V {\displaystyle V} przestrzenią Hilberta – istnienie zapewnia wtedy twierdzenie o rzucie ortogonalnym . W tym kontekście rzut ukośny nazywa się operatorem idempotentnym , a rzut ortogonalny znany jest jako operator rzutowy .
Rzut jest ortogonalny wtedy i tylko wtedy, gdy jest i) samosprzężony [g] normalny lub iii) dodatni (dodatnio określony) lub iv) izometryczny . Rzuty ortogonalne są operatorami ograniczonymi (czyli ciągłymi ), a gdy są nietrywialne: o jednostkowej normie operatorowej [h] A {\displaystyle \mathrm {A} } A ∗ A = A . {\displaystyle \mathrm {A} ^{*}\mathrm {A} =\mathrm {A} .}
Gdy rozważana przestrzeń jest zespolona , gwiazdkę przy oznaczeniu macierzy należy interpretować jako sprzężenie hermitowskie , w pozostałych przypadkach – jako transpozycję ; w przypadku przekształceń gwiazdka oznacza (antyliniowe ) przekształcenie sprzężone do danego. Jeśli u 1 , … , u k {\displaystyle \mathbf {u} _{1},\dots ,\mathbf {u} _{k}} bazą ortonormalną podprzestrzeni U {\displaystyle U} A {\displaystyle \mathbf {A} } n × k , {\displaystyle n\times k,} u 1 , … , u k , {\displaystyle \mathbf {u} _{1},\dots ,\mathbf {u} _{k},}
P A = A A ∗ {\displaystyle \mathbf {P} _{\mathbf {A} }=\mathbf {AA} ^{*}} i reprezentuje ona przekształcenie, które można zapisać jako[i]
P A ( ⋅ ) = ∑ i = 1 k u i ⟨ u i , ⋅ ⟩ . {\displaystyle \mathrm {P} _{\mathrm {A} }(\cdot )=\sum _{i=1}^{k}\mathbf {u} _{i}\langle \mathbf {u} _{i},\cdot \rangle .} W szczególności rzut na prostą (przestrzeń jednowymiarową) rozpinaną przez wektor jednostkowy u {\displaystyle \mathbf {u} } P u ( ⋅ ) = u ⟨ u , ⋅ ⟩ , {\displaystyle \mathrm {P} _{\mathbf {u} }(\cdot )=\mathbf {u} \langle \mathbf {u} ,\cdot \rangle ,} P u = u u ∗ {\displaystyle \mathbf {P} _{\mathbf {u} }=\mathbf {uu} ^{*}} [j]
Macierz A ∗ {\displaystyle \mathbf {A} ^{*}} izometrię częściową A ∗ , {\displaystyle \mathrm {A} ^{*},} U , {\displaystyle U,} A {\displaystyle \mathrm {A} } izometrią , która zanurza U {\displaystyle U} V . {\displaystyle V.}
Warunek ortonormalności można opuścić; jeżeli u 1 , … , u k {\displaystyle \mathbf {u} _{1},\dots ,\mathbf {u} _{k}} A {\displaystyle \mathbf {A} } [k]
P A = A ( A ∗ A ) − 1 A ∗ . {\displaystyle \mathbf {P} _{\mathbf {A} }=\mathbf {A} (\mathbf {A} ^{*}\mathbf {A} )^{-1}\mathbf {A} ^{*}.} Reprezentowane przez tę macierz przekształcenie nadal zanurza U {\displaystyle U} V , {\displaystyle V,}
Przykłady Przekształcenie liniowe , którego macierz ma postać [ 1 0 0 0 ] , {\displaystyle \left[{\begin{smallmatrix}1&0\\0&0\end{smallmatrix}}\right],} [ 0 1 0 1 ] {\displaystyle \left[{\begin{smallmatrix}0&1\\0&1\end{smallmatrix}}\right]} Przestrzeń L 2 ( R ) {\displaystyle \mathrm {L} ^{2}(\mathbb {R} )} całkowalnych z kwadratem (w sensie Lebesgue’a ) jest ortogonalną sumą prostą przestrzeni M , N {\displaystyle M,N} funkcji parzystych i nieparzystych ; rzuty P M , P N {\displaystyle \mathrm {P} _{M},\mathrm {P} _{N}} M , N {\displaystyle M,N} [l] P M f ( x ) = f ( x ) + f ( − x ) 2 oraz P N f ( x ) = f ( x ) − f ( − x ) 2 , {\displaystyle \mathrm {P} _{M}f(x)={\tfrac {f(x)+f(-x)}{2}}\qquad {\text{ oraz }}\qquad \mathrm {P} _{N}f(x)={\tfrac {f(x)-f(-x)}{2}},} przy czym I − P M = P N . {\displaystyle \mathrm {I} -\mathrm {P} _{M}=\mathrm {P} _{N}.} Niech A {\displaystyle A} zbiorem mierzalnym R , {\displaystyle \mathbb {R} ,} funkcją charakterystyczną χ A . {\displaystyle \chi _{A}.} [l] P A f ( x ) = χ A ( x ) f ( x ) {\displaystyle \mathrm {P} _{A}f(x)=\chi _{A}(x)f(x)} L 2 ( R ) {\displaystyle \mathrm {L} ^{2}(\mathbb {R} )} nośniku zawartym w domknięciu A ¯ . {\displaystyle {\overline {A}}.} Zamiast wspomnianej wcześniej przestrzeni Hilberta R n {\displaystyle \mathbb {R} ^{n}} P u ( x ) = u u ∗ x {\displaystyle \mathrm {P} _{\mathbf {u} }(\mathbf {x} )=\mathbf {uu} ^{*}\mathbf {x} } przestrzeni ciągów ℓ 2 ( Z ) , {\displaystyle \ell ^{2}(\mathbb {Z} ),} u = e n , {\displaystyle \mathbf {u} =\mathbf {e} _{n},} e n = ( δ k , n ) k = − ∞ + ∞ {\displaystyle \mathbf {e} _{n}=\left(\delta _{k,n}\right)_{k=-\infty }^{+\infty }} [m] x = ( x k ) , {\displaystyle \mathbf {x} =(x_{k}),} P e n ( x ) = x n e n . {\displaystyle \mathrm {P} _{\mathbf {e} _{n}}(\mathbf {x} )=x_{n}\mathbf {e} _{n}.} Jeśli z kolei dana jest przestrzeń L 2 ( T ) {\displaystyle \mathrm {L} ^{2}(\mathbb {T} )} przestrzenią funkcji o okresie 2 π {\displaystyle 2\pi } [n] u = 1 / 2 π {\displaystyle u=1/{\sqrt {2\pi }}} funkcją stałą o jednostkowej normie, to rzut ortogonalny P u {\displaystyle \mathrm {P} _{u}} f {\displaystyle f} średnią ⟨ f ⟩ , {\displaystyle \langle f\rangle ,} ⟨ f ⟩ = 1 2 π ∫ 0 2 π f ( x ) d x . {\displaystyle \langle f\rangle ={\frac {1}{2\pi }}\int _{0}^{2\pi }\!\!f(x)\ \mathrm {d} x.} Odpowiadający temu rzutowi rozkład ortogonalny, f ( x ) = ⟨ f ⟩ + f ′ ( x ) , {\displaystyle f(x)=\langle f\rangle +f'(x),} ⟨ f ⟩ {\displaystyle \langle f\rangle } f ′ {\displaystyle f'} Uwagi ↑ Etymologia w artykule projekcja . ↑ Wystarczy przyjąć u = P ( v ) {\displaystyle \mathbf {u} =\mathrm {P} (\mathbf {v} )} w = v − u , {\displaystyle \mathbf {w} =\mathbf {v} -\mathbf {u} ,} P ( w ) = P ( v − P ( v ) ) = P ( v ) − P 2 ( v ) = P ( v ) − P ( v ) = 0 . {\displaystyle {\begin{aligned}\mathrm {P} (\mathbf {w} )&=\mathrm {P} {\big (}\mathbf {v} -\mathrm {P} (\mathbf {v} ){\big )}=\mathrm {P} (\mathbf {v} )-\mathrm {P} ^{2}(\mathbf {v} )\\&=\mathrm {P} (\mathbf {v} )-\mathrm {P} (\mathbf {v} )=\mathbf {0} .\end{aligned}}} P {\displaystyle \mathrm {P} } v , {\displaystyle \mathbf {v} ,} P ( v ) = P ( w + u ) = P ( w ) + P ( u ) = 0 + u = u . {\displaystyle \mathrm {P} (\mathbf {v} )=\mathrm {P} (\mathbf {w} +\mathbf {u} )=\mathrm {P} (\mathbf {w} )+\mathrm {P} (\mathbf {u} )=\mathbf {0} +\mathbf {u} =\mathbf {u} .} ↑ Niech v {\displaystyle \mathbf {v} } λ {\displaystyle \lambda } P . {\displaystyle \mathrm {P} .} λ u = P ( u ) = P ( P ( u ) ) = P ( λ u ) = λ 2 u , {\displaystyle \lambda \mathbf {u} =\mathrm {P} (\mathbf {u} )=\mathrm {P} {\big (}\mathrm {P} (\mathbf {u} ){\big )}=\mathrm {P} (\lambda \mathbf {u} )=\lambda ^{2}\mathbf {u} ,} u ≠ 0 , {\displaystyle \mathbf {u} \neq \mathbf {0} ,} λ = λ 2 , {\displaystyle \lambda =\lambda ^{2},} λ ( λ − 1 ) = 0 , {\displaystyle \lambda (\lambda -1)=0,} λ = 0 {\displaystyle \lambda =0} λ = 1. {\displaystyle \lambda =1.} ↑ Niech u 1 , … , u k {\displaystyle \mathbf {u} _{1},\dots ,\mathbf {u} _{k}} U . {\displaystyle U.} u i = P ( v i ) , {\displaystyle \mathbf {u} _{i}=\mathrm {P} (\mathbf {v} _{i}),} P ( u i ) = P 2 ( v i ) = P ( v i ) = u i {\displaystyle \mathrm {P} (\mathbf {u} _{i})=\mathrm {P} ^{2}(\mathbf {v} _{i})=\mathrm {P} (\mathbf {v} _{i})=\mathbf {u} _{i}} ( i = 1 , … , k ) , {\displaystyle (i=1,\dots ,k),} P {\displaystyle P} λ = 1. {\displaystyle \lambda =1.} P {\displaystyle \mathrm {P} } λ = 1 {\displaystyle \lambda =1} P . {\displaystyle \mathrm {P} .} twierdzenia o rzędzie wynika jednak, że dim i m P + dim ker P = dim V 1 ( P ) + dim V 0 ( P ) = dim V {\displaystyle \dim \mathrm {im\;P} +\dim \ker \mathrm {P} =\dim V_{1}(\mathrm {P} )+\dim V_{0}(\mathrm {P} )=\dim V} ker P = dim V 0 ( P ) {\displaystyle \ker \mathrm {P} =\dim V_{0}(\mathrm {P} )} V . {\displaystyle V.} V , {\displaystyle V,} V = i m P ⊕ ker P , {\displaystyle V=\mathrm {im\;P} \oplus \ker \mathrm {P} ,} P {\displaystyle \mathrm {P} } P {\displaystyle \mathrm {P} } λ = 1 {\displaystyle \lambda =1} P . {\displaystyle \mathrm {P} .} r a n k P = dim i m P = dim V 1 ( P ) = t r P . {\displaystyle \mathrm {rank\;P} =\dim \mathrm {im\;P} =\dim V_{1}(\mathrm {P} )=\mathrm {tr\;P} .} ↑ Jeśli A = B D B − 1 , {\displaystyle \mathrm {A} =\mathrm {BDB} ^{-1},} D {\displaystyle \mathrm {D} } macierz jest macierzą diagonalną ) wyłącznie z wartościami własnymi równymi zeru lub jedynce (na przekątnej głównej), to A 2 = B D B − 1 B D B − 1 = B D 2 B − 1 = B D B − 1 = A , {\displaystyle \mathrm {A} ^{2}=\mathrm {BDB} ^{-1}\mathrm {BDB} ^{-1}=\mathrm {B} \mathrm {D} ^{2}\mathrm {B} ^{-1}=\mathrm {B} \mathrm {D} \mathrm {B} ^{-1}=\mathrm {A} ,} D 2 = D , {\displaystyle \mathrm {D} ^{2}=\mathrm {D} ,} A 2 = A , {\displaystyle \mathrm {A} ^{2}=\mathrm {A} ,} A {\displaystyle \mathrm {A} } ↑ Z bezpośredniego rachunku wynika, że Q 2 = ( I − P ) 2 = ( I − P ) ( I − P ) = I 2 − P I − I P + P 2 = I − 2 P + P = I − P = Q , {\displaystyle {\begin{aligned}\mathrm {Q} ^{2}&=(\mathrm {I} -\mathrm {P} )^{2}=(\mathrm {I} -\mathrm {P} )(\mathrm {I} -\mathrm {P} )\\&=\mathrm {I} ^{2}-\mathrm {PI} -\mathrm {IP} +\mathrm {P} ^{2}\\&=\mathrm {I} -2\mathrm {P} +\mathrm {P} =\mathrm {I} -\mathrm {P} =\mathrm {Q} \end{aligned}},} Q 2 = Q . {\displaystyle \mathrm {Q} ^{2}=\mathrm {Q} .} ↑ Wychodząc od samosprzężoności i idempotentności P {\displaystyle \mathrm {P} } u , v ∈ V {\displaystyle \mathbf {u} ,\mathbf {v} \in V} P ( u ) ∈ U , {\displaystyle \mathrm {P} (\mathbf {u} )\in U,} v − P ( v ) ∈ W {\displaystyle \mathbf {v} -\mathrm {P} (\mathbf {v} )\in W} ⟨ P ( u ) , v − P ( v ) ⟩ = ⟨ P 2 ( u ) , v − P ( v ) ⟩ = ⟨ P ( u ) , P ( I − P ) ( v ) ⟩ = ⟨ P ( u ) , ( P − P 2 ) ( v ) ⟩ = ⟨ P ( u ) , 0 ⟩ = 0 , {\displaystyle {\begin{aligned}&{\big \langle }\mathrm {P} (\mathbf {u} ),\mathbf {v} -\mathrm {P} (\mathbf {v} ){\big \rangle }\\&={\big \langle }\mathrm {P} ^{2}(\mathbf {u} ),\mathbf {v} -\mathrm {P} (\mathbf {v} ){\big \rangle }\\&={\big \langle }\mathrm {P} (\mathbf {u} ),\mathrm {P} (\mathrm {I} -\mathrm {P} )(\mathbf {v} ){\big \rangle }={\big \langle }\mathrm {P} (\mathbf {u} ),(\mathrm {P} -\mathrm {P} ^{2})(\mathbf {v} ){\big \rangle }\\&={\big \langle }\mathrm {P} (\mathbf {u} ),\mathbf {0} {\big \rangle }=0\end{aligned}},} ⟨ ⋅ , ⋅ ⟩ {\displaystyle \langle \cdot ,\cdot \rangle } iloczyn skalarny przestrzeni V , {\displaystyle V,} I {\displaystyle \mathrm {I} } operator tożsamościowy . Stąd P ( v ) {\displaystyle \mathrm {P} (\mathbf {v} )} v − P ( v ) {\displaystyle \mathbf {v} -\mathrm {P} (\mathbf {v} )} P {\displaystyle \mathrm {P} } ⟨ u , P ( v ) ⟩ = ⟨ P ( u ) , v ⟩ = ⟨ u , P ∗ ( v ) ⟩ {\displaystyle {\big \langle }\mathbf {u} ,\mathrm {P} (\mathbf {v} ){\big \rangle }={\big \langle }\mathrm {P} (\mathbf {u} ),\mathbf {v} {\big \rangle }={\big \langle }\mathbf {u} ,\mathrm {P} ^{*}(\mathbf {v} ){\big \rangle }} u , v ∈ V ; {\displaystyle \mathbf {u} ,\mathbf {v} \in V;} P = P ∗ . {\displaystyle \mathrm {P} =\mathrm {P} ^{*}.} ↑ Dla dowolnego wektora v ∈ V {\displaystyle \mathbf {v} \in V} nierówności Cauchy’ego–Schwarza jest ‖ P ( v ) ‖ 2 = ⟨ P ( v ) , P ( v ) ⟩ = ⟨ P ( v ) , v ⟩ ⩽ ‖ P ( v ) ‖ ‖ v ‖ , {\displaystyle {\big \|}\mathrm {P} (\mathbf {v} ){\big \|}^{2}={\big \langle }\mathrm {P} (\mathbf {v} ),\mathrm {P} (\mathbf {v} ){\big \rangle }={\big \langle }\mathrm {P} (\mathbf {v} ),\mathbf {v} {\big \rangle }\leqslant {\big \|}\mathrm {P} (\mathbf {v} ){\big \|}\ \|\mathbf {v} \|,} ‖ P ( v ) ‖ ⩽ ‖ v ‖ , {\displaystyle {\big \|}\mathrm {P} (\mathbf {v} ){\big \|}\leqslant \|\mathbf {v} \|,} P {\displaystyle \mathrm {P} } norma operatorowa ‖ P ‖ ⩽ 1. {\displaystyle \|\mathrm {P} \|\leqslant 1.} P ≠ θ , {\displaystyle \mathrm {P} \neq \mathrm {\theta } ,} v , {\displaystyle \mathbf {v} ,} P ( v ) ≠ 0 {\displaystyle \mathrm {P} (\mathbf {v} )\neq \mathbf {0} } ‖ P 2 ( v ) ‖ = ‖ P ( v ) ‖ , {\displaystyle {\big \|}\mathrm {P} ^{2}(\mathbf {v} ){\big \|}={\big \|}\mathrm {P} (\mathbf {v} ){\big \|},} ‖ P ‖ ⩾ 1. {\displaystyle \|\mathrm {P} \|\geqslant 1.} ‖ P ‖ = 1. {\displaystyle \|\mathrm {P} \|=1.} ↑ W notacji Diraca jest P A = ∑ i = 1 k | u i ⟩ ⟨ u i | . {\displaystyle \mathrm {P} _{\mathrm {A} }=\sum _{i=1}^{k}|\mathbf {u} _{i}\rangle \langle \mathbf {u} _{i}|.} ↑ Wtedy P u ( x ) = u u ∗ x . {\displaystyle \mathbf {P} _{\mathbf {u} }(\mathbf {x} )=\mathbf {uu} ^{*}\mathbf {x} .} notacji Diraca jest P u = | u ⟩ ⟨ u | ; {\displaystyle \mathrm {P} _{\mathbf {u} }=|\mathbf {u} \rangle \langle \mathbf {u} |;} P u ( x ) = | u ⟩ ⟨ u | x ⟩ . {\displaystyle \mathrm {P} _{\mathbf {u} }(\mathbf {x} )=|\mathbf {u} \rangle \ \langle \mathbf {u} |\mathbf {x} \rangle .} P u = u ⊗ u {\displaystyle \mathrm {P} _{\mathbf {u} }=\mathbf {u} \otimes \mathbf {u} } iloczynu diadycznego ). ↑ Macierz ( A ∗ A ) − 1 {\displaystyle (\mathbf {A} ^{*}\mathbf {A} )^{-1}} u u ∗ {\displaystyle \mathbf {uu} ^{*}} ‖ u ‖ = 1 ; {\displaystyle \|\mathbf {u} \|=1;} u ∗ u = ‖ u ‖ 2 {\displaystyle \mathbf {u} ^{*}\mathbf {u} =\|\mathbf {u} \|^{2}} u ( u ∗ u ) − 1 u ∗ = u u ∗ / ‖ u ‖ 2 {\displaystyle \mathbf {u} (\mathbf {u} ^{*}\mathbf {u} )^{-1}\mathbf {u} ^{*}=\mathbf {uu} ^{*}/\|\mathbf {u} \|^{2}} s p a n u . {\displaystyle \mathrm {span\;} \mathbf {u} .} ↑ a b Oznaczenia P X f ( x ) {\displaystyle \mathrm {P} _{X}f(x)} ( P X ( f ) ) ( x ) , {\displaystyle {\big (}\mathrm {P} _{X}(f){\big )}(x),} P X ( f ) {\displaystyle \mathrm {P} _{X}(f)} L 2 ( R ) , {\displaystyle \mathrm {L} ^{2}(\mathbb {R} ),} P X : L 2 ( R ) → L 2 ( R ) {\displaystyle \mathrm {P} _{X}\colon \mathrm {L} ^{2}(\mathbb {R} )\to \mathrm {L} ^{2}(\mathbb {R} )} X {\displaystyle X} L 2 ( R ) . {\displaystyle \mathrm {L} ^{2}(\mathbb {R} ).} ↑ Zob. delta Kroneckera δ k , n . {\displaystyle \delta _{k,n}.} ↑ Por. grupa okręgu T . {\displaystyle \mathbb {T} .} Bibliografia F.W. Gehring, P.R. Halmos, C.C Moore: A Course in Functional Analysis . Nowy Jork: Springer-Verlag, 1985. brak strony w książce Wektory i działania na nich Układy wektorów i ich macierze Wyznaczniki i miara układu wektorów Przestrzenie liniowe Odwzorowania liniowe Diagonalizacja Iloczyny skalarne Pojęcia zaawansowane Pozostałe pojęcia Powiązane dyscypliny Znani uczeni






















































![{\displaystyle \left[{\begin{smallmatrix}1&0\\0&1\end{smallmatrix}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/765b8147864544b36f917d90fe67728dcd47417f)
![{\displaystyle \left[{\begin{smallmatrix}1&0\\0&0\end{smallmatrix}}\right],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ef2e796a45d3fe43bc85fc38cff53215da6c0ee8)
![{\displaystyle \left[{\begin{smallmatrix}0&1\\0&1\end{smallmatrix}}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/bdc7bb80e487b6a387428e7d48596867cfc35b2d)









































































































