Afin dönüşümü
Geometride, afin dönüşüm (Latinceden, affinis, "birbirine bağlılık") veya ilgin dönüşüm, afin uzaylar arasında noktaları, düz çizgileri ve düzlemleri koruyan bir eşlemedir.[1] Ayrıca, paralel çizgi kümeleri bir afin dönüşüm sonrası paralel kalır. Bir afin dönüşümde aynı doğru üzerinde duran noktalar arasındaki mesafe oranları korunmasına rağmen, çizgiler arasındaki açılar ve noktalar arasındaki mesafeler korunmayabilir.
Öteleme, dönme, ölçekleme, benzeşim, benzerlik dönüşümü, yansıma, kayma eşlemesi ve bunların kombinasyonları birer ilgin dönüşüm örneğidir.
ve afin uzayları için, her afin dönüşümü formundadır. Burada bir doğrusal dönüşümü, bir vektörü ( uzayında) ve bir vektörü ( uzayında) ifade eder. Doğrusal dönüşümün aksine, ilgin dönüşüm doğrusal bir uzayda sıfır noktasının korunmasını gerektirmez. Bu yüzden, her doğrusal dönüşüm ilgindir, ama her ilgin dönüşüm doğrusal değildir.







Öklid uzayı çok amaç için bir afin uzay olarak düşünülüyor olabilir,Afin uzayı kavramı daha genel olmasına rağmen (yani, tüm Öklid uzaylar afin, ama Öklidyen olmayan olan afin uzaylarda vardır).afin koordinatlarda,kartezyen koordinatlar Öklid uzaylarinda yer alır, Bir afin haritanın her koordinatı çıkışı doğrusal fonksiyondur; o zaman, (durum vektörleri) herhangi bir afin dönüşüm bir doğrusal dönüşüme eşdeğerdir bir öteleme aşağıdadır.
Matematiksel Tanımı
İki afin uzay arasında (bu,iki uzay noktaları arasındaki vektörler olup) vektörler üzerinde doğrusal hareket noktalarının bir göndermesidir.[1] Semboller, bu noktaların herhangi bir çifti için bir f lineer dönüşümü olan φ 'yi belirler;

- :


veya
- .

Aşağıda başka birkaç yolla bu tanımı yorumlayabiliriz..
seçersek,imaji olur , bu demektir ki bir vektör :





Eğer orijin seçilirse bu bir afin dönüşüm olarak ayrıştırılabilir ve görüntüsü ise,herhangi bir vektörü için bunun anlamı

- buraya gönderir yani
- tarafından aşağıda çevrilen sonuç olarak bu,sezgisel bir bir öteleme ile doğrusal harita oluşur.





Alternatif tanımlar
Ayni alan üzerinde iki Afin uzay ve veriliyor fonksiyonu afin bir göndermedir ancak ve ancak her aile için agirlik noktalaridir böylece





Bir diğer ifadeyle, barycenter ler korunur.
Gösterimler
Yukarıda gösterilen, bir afin gönnderme iki fonksiyonun kompozisyonudur: bir öteleme ve bir doğrusal gönderme. Olağan vektör cebri doğrusal göndermeler gönderimi için matris çarpımı ve ötelemeler gösterimi için vektör toplamı kullanılıyor. Resmi olarak,sonlu-boyutlu durum içinde, eğer doğrusal gönderme bir matris A ile bir çarpım olarak ve bir vektör nin toplamı öteleme olarak gösteriliyorsa, bir vektör üzerinde hareketi bir afin gönderme olarak gösterilebilir


Genişletilmiş matris
Bir genişletilmiş matris ve bir genişletilmiş vektör kullanılıyor, bunu hem öteleme ve hem doğrusal gönderme bir tek matris çarpımı ile temsil etmek mümkündür.Bu teknikle tüm vektörleri genişletmek gerekir sonda bir "1" ile genişler,ve tüm matrisler altta sıfırın bir fazladan satırı kadar genişletiliyor,bir fazladan sütun sağa-öteleme vektörü-ve sağ alt köşe içinde bir "1". Eğer A bir matris ise,

aşağıdakine eşdeğerdir.

Düzlemin afin dönüşümü

Iki gerçek boyutlu Afin dönüşümler dahil:
- Tam öteleme,
- Başka bir yönde bir çizgi ile ilgili olarak belirli bir yönde ölçekleme(dik olması gerekmez), öteleme ile birlikte ölçekleme yönünde saf değildir; genel bir anlamda "ölçeklendirme" alarak bu durumda ölçek faktörü içeren (izdüşüm) sıfırdır veya negatiftir; sonra ise yansıma ve öteleme ile birlikte öteleme yansıması içerir,
- dönmeyle kombine benzerlik ile bir öteleme,
- Bir benzerlik ve bir öteleme ile birlikte kesme gönderme veya
- Bir benzeşim ve bir öteleme ile birlikte sıkı gönderme .
Öklid planında genel afin gösteriminin görselleştirilmesi için paralelkenarlar ABCD ve A′B′C′D olarak ′etiketlenir. Seçilen herhangi iki nokta burada,A dan A′ya T planında afin dönüşüm olarak alınıyor ve her tepe eşdeğerdir. Varsayalımki dejenere durumları dışlıyoruz burada ABCDsıfır bölge idi,ayrıca burada tek benzersiz afin dönüşüm T dir. ABCD tabanlı paralelkenarın bir bütün gridi dışarı sürülerek,herhangi bir T(A) belirtilerek P noktası tarafından belirlenen bu imaj T(P) dir. T(A) = A′,T AB çizgi parçasına uygulanan A′B′dir, T' çizgi parçasına uygulanan AC A′C′dir ve A tabanlı vektörlerin T sırasıyla skaler topluluğudur.[Eğer A, E, F eşdoğrusal ise kesir(AF)uzunluğu/(AE)uzunluğu eşittir.(A′F′)uzunluğu/(A′E′) uzunluğu.] geometrik T ye göre ABCD yi A′B′C′D′ tabanına grid dönüştürür .
Afin dönüşümlerin uzunlukları veya açılarını sırası yok etmek için bu alanı sabit bir katsayısı ile çarpmak gerekir.
- A′B′C′D′ bölgesi / ABCD bölgesi.
olarak verilen bir T ye doğrudan (sıralı yönlendirme ), veya dolaylı (ters yönlendirme) olabilir ve bu işaret olarak etkisi tarafından belirlenen bölgedir (örnek için vektörlerin çapraz çarpım'ı tanımlanır).
Afin dönüşümlerin örnekleri
Reel sayılar üzerinde Afin dönüşümler
f : R → R fonksiyonları, f(x) = mx + c ile m ve c sabiti,olağan afin dönüşümler yapar.
Sonlu bir alan üzerinde afin dönüşüm
Afin bir dönüşüm içeren GF(28) denklemi aşağıdaki ifade edilmiştir:

burada [M] matristir ve {v} vektördür.
|


Örneğin,büyük-sonlu ikili gösterimi içinde aşağıdaki hesaplanan elemanın afin dönüşümü büyük-sonlu hekzadesimal gösterim içinde {CA} ={a} = y7 + y6 + y3 + y = {11001010} :








Böylece, {a′} = y7 + y6 + y5 + y3 + y2 + 1 = {11101101} = {ED} afin dönüşümü elde edilir.
Düzlem geometride Afin dönüşüm
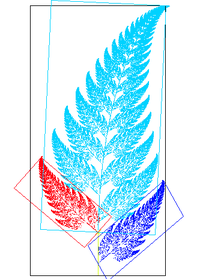
ℝ2 içinde,dönüşüm tarafından verilen gönderme ile sağ tarafta gerçekleştirilen gösterim:

Orijinal üçgen (kırmızı) üç köşe noktaları dönüşüm ile yeni üçgen(mavi) oluşturan üç yeni nokta verir. Bu dönüşüm orijinal üçgeni eğriltir ve öteler. Aslında, her üçgen afin bir dönüşüm başka bir üçgen ile ilgilidir.Bu, aynı zamanda tüm paralelkenarlar için değil,tüm dörtgenler için de geçerlidir.
Ayrıca bakınız
- Bir afin dönüşüm için dönüşüm matrisi
- Afin geometri
- 3D izdüşüm
- Flat (geometri)
Notlar
Kaynakça
- Berger, Marcel (1987), Geometry I, Berlin: Springer, ISBN 3-540-11658-3
- Nomizu, Katsumi; Sasaki, S. (1994), Affine Differential Geometry (New bas.), Cambridge University Press, ISBN 978-0-521-44177-3
- Sharpe, R. W. (1997). Differential Geometry: Cartan's Generalization of Klein's Erlangen Program. New York: Springer. ISBN 0-387-94732-9.
Dış bağlantılar
- "Affine Transformation Example". Hakan Haberdar, University of Houston. 11 Şubat 2015 tarihinde kaynağından arşivlendi.
- Hazewinkel, Michiel, (Ed.) (2001), "Affine transformation", Encyclopaedia of Mathematics, Kluwer Academic Publishers, ISBN 978-1556080104
- Geometric Operations: Affine Transform 10 Ekim 2013 tarihinde Wayback Machine sitesinde arşivlendi., R. Fisher, S. Perkins, A. Walker and E. Wolfart.
- Eric W. Weisstein, Affine Transformation (MathWorld)
- Affine Transform 12 Ekim 2013 tarihinde Wayback Machine sitesinde arşivlendi. by Bernard Vuilleumier, Wolfram Demonstrations Project.
- Affine Transformation on PlanetMath 1 Mart 2012 tarihinde Wayback Machine sitesinde arşivlendi.
- Free Affine Transformation software
| Otorite kontrolü |
|
|---|










