Em matemática, a transformada de Laplace é uma transformada integral epónimo a seu descobridor, o matemático e astrônomo Pierre-Simon Laplace (/ləˈplɑːs/), que utilizou uma forma semelhante em seus trabalhos de Teoria da Probabilidade. A sua teoria foi desenvolvida mais a fundo entre o século XIX e o início do século XX por Matyáš Lerch, Oliver Heaviside e Thomas John I'Anson Bromwich.
A transformada gera uma função de variável (frequência) a partir de uma função de variável (tempo) e vice-versa.
A atual aplicação da transformada (principalmente em engenharia) foi inicialmente descoberta durante a Segunda Guerra Mundial e substituiu o cálculo operacional.
Quando fala-se em "transformada de Laplace" sem especificação, geralmente, refere-se à forma unilateral. A transformada de Laplace é originalmente definida pela forma bilateral, em que e . Assim, a transformada unilateral em que qualquer argumento é múltiplo da função de Heaviside, torna-se apenas um caso especial devido ao intervalo de domínio da função de Heaviside.
A transformada de Laplace da função é uma função de , que representa a frequência. Utilizamos então como notação a letra maiúscula para a transformada e letra minúscula para a função.
Ex: ou .
Para calcular a transformada de Laplace de uma função aplicamos a integral e definimos algumas condições para podermos tirar o limite.
Ex:
, porém esse limite só existe se o .
Então conclui-se que:
Agora se considerarmos que realizando as integrações necessárias (por partes) concluímos que:
=
=
=
Com isso concluímos uma expressão para a transformada de :
A transformada de Laplace ganhou esse nome em homenagem ao matemático e astrônomo Pierre-Simon Laplace, que usou uma transformada semelhante em um estudo sobre a teoria da Probabilidade.[1] No final do século XIX e início do século XX, a teoria de geração de funções começou a ser mais desenvolvida pelo matemáticos Mathias Lerch, Oliver Heaviside e Thomas Bromwich; no entanto, somente após a segunda guerra mundial que a transformada de Laplace foi difundida (principalmente na engenharia), substituindo o cálculo operacional de Heaviside. O responsável por ter apresentado as vantagens de utilizar a transformada foi o matemático Gustav Doetsch.
Antes dos estudos de Laplace, alguns métodos de transformadas integrais foram apresentadas, mas pouco desenvolvidos. A partir de 1744, Leonhard Euler investigou a existência de integrais da forma
Admirador de Euler, Joseph Lagrange, procurou compreender também, em seus estudos sobre a função densidade, expressões da forma
.
Foram com as mesmas intenções de Euler de resolver equações diferenciais que em 1782 Laplace começou seu estudo sobre esse tipo de integrais. Entretanto, em 1785, Laplace deu um passo crucial ao desenvolvimento da teoria de transformadas integrais. Ao invés de focar somente em encontrar soluções de equações a partir do uso da integral, ele passou a aplicar a transformada de modo que fosse encontrada a solução da transformada em si e não da equação inicial. Para isso, Laplace utilizou uma integral da forma
.
Região de convergência
Dada uma função em que a sua integral é dada por: , definida somente para números reais positivos, e se convergir para algum valor, a integral será a transformada de Laplace da função . Que é representada por .[2]
Condição de existência
A integral que define a transformada de Laplace nem sempre converge e, nesse caso, dizemos que a função não possui transformada de Laplace. As funções e são algumas funções que não possuem transformada de Laplace.
Dizemos que uma função é de ordem exponencial se existem constantes , e tal que , . [2]
As funções , e são de ordem exponencial, pois
Tal teorema apresenta condições suficientes para existência da transformada de Laplace. Estas condições não são, contudo, necessárias. Por exemplo, a função não é contínua na origem(sequer é limitada quando ) mas admite uma transformada de Laplace.[2]
Comportamento no Infinito:
Demonstração: Por definição,
Estabelecendo u = s.t , obtemos:
Considerando que é limitada, existe tal que , portanto
A função de Heaviside é nula para um argumento negativo e unitária para um argumento positivo. Ela respeita a relação e pode ser definida como
Ao efetuar-se a mudança de variável , obtém-se a função de Heaviside com descontinuidade em :
Torna-se, naturalmente, importante notar que a função de Heaviside não existe em . Para isso, quando for necessário defini-la neste ponto, toma-se a "função rampa" como aproximação contínua:
Talvez a mais importante aplicação da função da Heaviside seja a função pulso.
Uma aplicação em engenharia para a função Delta de Dirac, se dá na utilização da Equação do Helmholtz, usada para cálculos de um sistema de barragem albufeira, na qual o termo Albufeira significa uma área coberta de água, que foi retida pela construção de uma barragem ou até mesmo uma represa num rio, formando uma espécie de lago artificial. Pode ser também utilizada para modelagem de águas subterrânea principalmente de aquíferos, onde a função representa a vazão bombeada por um poço em um ponto específico.
Tabela de Teoremas e Propriedades
Descrição
Domínio do Tempo
Domínio s
Observações
Linearidade
Prova pela lei básica de integração
Derivada no Domínio da frequência
Derivada Geral do Domínio da frequência
forma geral da derivada de n
Derivada
f é assumido como uma função diferenciável, e sua derivada é assumida como sendo do tipo exponencial. Isso pode ser obtido pela integração por partes
Segunda derivada
f é assumido duas vezes diferenciável e a segunda derivada para ser do tipo exponencial. Segue aplicando a propriedade diferenciação para f′(t).
N-ésima derivada
f s assumido como sendo n-diferenciável, com enésima derivada do tipo exponencial. Segue por indução matemática.
Isso é deduzido usando a natureza da diferenciação de freqüência e convergência condicional.
f(t) é uma função periódica do período T então f(t) = f(t + T), para todo t ≥ 0. isto e o resultado da mudança do tempo e a propriedade series geométricas.
A transformada de Laplace possui inúmeras propriedades operacionais que permitem a existência tanto da transformada direta quanto da inversa, para uma ampla gama de funções observadas na ciência. Suas propriedades são:
Suponha que P(X) e Q(x) são polinômios tais que o grau de P é menor que o grau de Q. O polinômio Q(x) pode ser fatorado em polinômios de graus um e dois:
com isso podemos encontrar constantes tais que:
esse método é usado para calcular integrais de funções racionais e transformadas inversas de Laplace.
Conhecida como deslocamento ou translação do eixo s, é possível conhecer a transformada de múltiplos exponenciais de uma função desde que conheçamos a sua transformada, isto é,
Se é uma função contínua por partes, de ordem exponencial e periódica de período . Então a transformada de Laplace existe e é da forma:
Derivada da transformada de Laplace
Se , então: .
Esta pode ser demonstrada usando a definição de transformada de Laplace:
Transformada de Fourier
A transformada de Fourier continua e equivalente a avaliação bilateral da transformada de Laplace com argumentos imaginários [3]
A definição de Fourier requer o prefixo na função reversa da transformada de fourier. Esta relação entre as transformadas de Fourier e Laplace e comumente usada para determinar o espectro de frequência de um sinal ou de um sistema dinâmico. A relação acima é válida somente se a região de convergência de F(s) contem o eixo imaginário, .
Integral da transformada de Laplace
A propriedade que define a integral da transformada de Laplace apresenta-se como:
Esta pode ser demonstrada ao aplicar-se a integração à definição fundamental da transformada de Laplace:
A tabela provê as transformadas de Laplace para as funções mais comuns de uma variável.[4][5] Para definições e exemplos, veja a nota explanatória no fim da tabela.
Usando a propriedade da linearidade e as relações/identidades trigonométricas, hiperbólicas e complexas, algumas transformadas de Laplace podem ser obtidas de outras mais rápida do que diretamente pela definição.
A unilateralidade da transformada de Laplace toma como entrada uma função cujo . Este é o motivo de todas as funções no domínio de tempo na tabela abaixo serem múltiplas da função de Heaviside, . As entradas desta tabela que envolvem um tempo de atraso são obrigadas a serem causais. Um sistema causal é um sistema em que a resposta ao impulso é nulo para todo tempo prévio a .
As diversas propriedades da transformada de Laplace possibilitam a transformação de um grande número de equações diferenciais ordinárias em simples equações algébricas lineares. Alguns tipos mais comuns de equações diferenciais são: Equação diferencial ordinária com coeficientes constantes
Em muitas ocasiões são necessários valores iniciais para uma resolução numérica dessas equações diferenciais.
Aplicação em Circuitos RL e RC
A aplicação da Transformação de Laplace para resolução de circuitos RL e RC é uma ferramenta interessante na resolução das equações diferenciais que expressam circuitos RC e RL, pois em determinados casos reduz a quantidade de análises e simplificações inerentes à resolução de circuitos baseado na Teoria de Circuitos. A exemplo do caso abaixo:
Considerando o circuito RL com duas malhas ao lado:
Modelo de Circuito RL com 2 malhas
Aplicando lei de Kirchhoff, temos as seguintes expressões:
Como a tensão no indutor é dada pela expressão:
Considerando
Chegamos as seguintes expressões:
- Dividindo as equações (I) e (II) e organizando-as temos:
Aplicando a Transformação de Laplace:
Chegamos então ao seguinte sistema:
Para exemplificar uma solução e a curva que refere-se a corrente i(t) no circuito, podemos tomar , para este caso temos a solução a seguir :
e
Assim, aplicando a Transformada de Laplace inversa, voltando para o domínio do tempo, temos a seguinte resposta:
e A
Correntes no circuito RL
Como esperado, no domínio do tempo temos uma curva exponencial inicialmente e depois se torna constante, isso ocorre por que para o indutor se comporta como um curto circuito, sua corrente será constante.
Agora vamos considerar o circuito RC:
Ao circuito resistor/capacitor é aplicada uma tensão V(t) do tipo pulso:
, ou seja, o circuito estava em repouso até t=a e tensão Vo foi aplicada entre t=a e t=b. O modelo para a corrente i(t) obedece a lei de Kirchoff:
, onde q(t) é a carga no capacitor, 1/Cq(t) é a tensão no capacitor de capacitância C e Ri(t) é a tensão no resistor de resistência R.
Vamos usar o fato de que e obtemos uma equação integral para i(t):
.
Para resolver esse problema de valor inicial, aplicamos a Transformada de Laplace e a propriedade da Transformada de Laplace da integral de uma função, que é:
e obtemos a seguinte expressão:
.
Fazendo , temos a seguinte equação subsidiária:
.
Logo, .
A Transformada Inversa de é: .
Fazendo obtemos: .
Dessa forma, para calcular a função corrente i(t) usaremos a propriedade do deslocamento no eixo t da Transformada de Laplace:
A função corrente i(t) é:
.
Podemos escrever a equação para a função corrente i(t) em uma notação de função definida por partes, fazendo e :
Podemos observar que A>0, B>0 e A<B. Assim, para t>b a corrente é negativa e se aproxima exponencialmente de zero. Essa é a corrente de descarga.
Para obter a carga q(t) no capacitor, usamos que e obtemos a seguinte expressão, também em notação de função definida por partes:
Com o intuito de compreender o comportamento de um circuito RC, utilizamos como base o circuito RC da figura ao lado, no qual podemos ver a tensão da fonte de Heaviside. A figura ao lado mostra uma fonte de tensão DC (10 Volts) que atua no instante 2s segundo até o instante 8s, no qual ela carrega o capacitor e depois ele descarrega. Utilizando as fórmulas da carga do capacitor e substituindo as resistências (R=150Ω) e capacitância (C=5mF), encontramos:
Capacitive circuit
O comportamento da carga do capacitor é análogo a da sua tensão, que é mostrado a seguir. Dessa forma, o comportamento da tensão do capacitor e da fonte Heaviside é mostrado na outra imagem.
Tension at RC circuit
[8][9]
Aplicação em Circuitos RLC de qualquer ordem
No estudo de circuitos elétricos aplica-se a Transformada de Laplace localmente em cada componente ao invés de aplicá-la em uma equação diferencial obtida desse mesmo circuito. Trabalhando dessa forma, o primeiro passo é transformar, pela aplicação de Laplace, o circuito dado no domínio tempo em um novo circuito no domínio frequência.
Abaixo seguem tabeladas as relações Volt-Ampere de resistor, capacitor e indutor no domínio tempo e suas correspondentes relações Volt-Ampere no domínio frequência. É fácil verificar que no domínio frequência todas as relações Volt-Ampere obedecem à Lei de Ohm, enquanto no domínio tempo as relações Volt-Ampere são relações integro-diferenciais. Portanto a aplicação da Transformada de Laplace na resolução de circuitos RL e RC é uma ferramenta dominante pela sua simplicidade, dado que pode-se aplicar no domínio frequência as mesmas técnicas simplificadoras de circuitos resistivos.
Circuitos Elétricos- Representação no domínio frequência (Laplace)
Componente
Domínio tempo
Domínio frequência
Resistor
Capacitor
Indutor
Circuitos Elétricos com carga inicial nula- Impedâncias (Laplace)
Componente
sem carga
Domínio tempo
Domínio frequência
Resistor
Capacitor
Indutor
Exemplo de Circuito RC descarregado no domínio tempo:
Circuito RC de ordem 2 no domínio tempo
Circuito RC transformado para o domínio frequência :
Circuito RC de ordem 2 no domínio frequência
Circuito RC simplificado pelo paralelo de impedâncias:
Circuito RC de ordem 2 no domínio frequência após simplificação.
onde T1(s) é a queda de tensão em Z(s):
Z(s) é o paralelo de com
Aplicando Z(s) em T1(s), resulta
Do circuito anterior à simplificação, combinado com o circuito simplificado, observa-se que
obtêm-se no domínio frequência, pela aplicação da Transformada de Laplace
Cálculo em frequência da resposta ao Estado Zero (circuito descarregado em t=0)
Aplicando-se frações parciais obtêm-se
resultando
Cálculo da resposta do circuito RC no domínio tempo :
Basta aplicar a Transformada Inversa de Laplace
do que resulta
Conclusão
Neste exemplo optou-se pelo cálculo de eo(t) pela aplicação sucessiva (2 vezes) de divisor de tensão. Para obter-se e1(t), bastaria fazer a Transformada Inversa de Laplace de E1(s), já obtido no primeiro divisor de tensão.
Por outro lado, o cálculo de eo(t) poderia ter sido desenvolvido pela aplicação da técnica de Equivalente Thevenin ao circuito de Laplace, o que levaria de forma até mais simples aos resultados de T(s) e Eo(s).
Aplicação em circuitos RLC
Circuitos RLC são modelados comumente por equações diferenciais, os valores dos componentes que constituem o circuito(Capacitores, Resistores e Indutores) e a frequência da fonte determinam o tipo de resposta do mesmo: Superamortecida, subamortecida e criticamente amortecida. Em geral essas equações diferenciais são de segunda ordem ou maior e podem ser resolvidas semelhantemente à resolução de equações diferenciais aplicando Transformada de Laplace.
As seguintes equações modelam circuitos simples RLC paralelo e série respectivamente:
e
Aplicando transformada de Laplace, considerando i(0) = 0 e i'(0) = 0, v(0)=0 e v'(0) =0:
e
O que nos dá a seguinte equação característica:
=> Resposta Superamortecida
=> Critica
Complexos => Subamortecida
Aplicação no cálculo da deflexão em vigas sujeitas a cargas concentradas
Considere uma viga elástica horizontal de comprimento L de seção transversal e material elástico homogêneo. Se aplicarmos uma carga no plano vertical através da viga o eixo de simetria é dobrado. Colocamos o eixo horizontal com origem no extremo a esquerda da viga e, portanto, x= L é o outro extremo. Supomos que a viga está sujeita a uma carga que provoca uma deflexão em cada ponto x [0,L] . Logo, para pequenas deflexões podemos aproximar a curvatura k(x) pela variação instantânea de , onde é o ângulo entre o eixo x e a tangente, ou seja,[10]
Como
Como o é pequeno, , portanto
Derivamos
Substituímos na primeira equação, obtendo
Sendo E o módulo de Young, I o momento de inércia da viga e M(x) o momento fletor, substituímos a fórmula da lei de Hooke para materiais na equação anterior.
Sabendo que a variação do momento de inércia M(x) é a força de cisalamento V(x)
e a variação da força de cisalamento é a carga
Logo,
Substituindo na equação anterior, temos a equação de Euler-Bernoulli
Consideraremos uma viga engastada, ou seja:
A carga está concentrada na posição e tem intensidade , sendo modelada pela seguinte expressão:
Aplicando a transformada de Laplace na equação que anteriormente foi derivada duas vezes, e usando o fato de que , obtemos
Substituindo , e onde e são constantes a determinar:
portanto:
Aplicação na Solução de Equações Diferenciais Parciais: corda semi-infinita
O método da resolução de equações diferenciais pela transformada de Laplace não está restrito apenas a equações diferenciais ordinárias. É possível também resolver certas equações diferenciais parciais. Esse método é conveniente quando pelo menos uma das variáveis independentes não assume valores negativos, pois pode-se tomar a transformada de laplace com respeito a essa variável e reduzi-la a uma equação diferencial ordinária na outra variável.
Para o caso de uma corda semi-infinita, deseja-se achar uma função que represente o deslocamento vertical de qualquer ponto da corda em qualquer instante de tempo . O problema está sujeito às seguintes condições:
Condições iniciais
A corda está inicialmente em repouso, ou seja:
A corda existe em (semi-infinita)
Condições de contorno
O ponto da corda em é excitado de maneira senoidal, ou seja:
Para valores muito distantes, em , o deslocamento da corda é nulo, formalmente:
Solução
A equação que descreve o problema é a conhecida equação da onda:
Onde é a tensão entre dois pontos da corda e é sua densidade linear.
Tomanda a transformada de Laplace em relação à variável :
Aplicando as condições iniciais sabe-se que e são ambos nulos.
Sob a hipótese de que é válido permutar a ordem de integração e diferenciação:
Unindo os dois lados da equação novamente:
Dessa forma o problema foi reduzido à solução de uma equação diferencial ordinária em , cuja solução geral é conhecida e dada por:
A solução deve satisfazer as condições de fronteira, em particular para um x muito grande o deslocamento deve ser nulo:
Por meio da expressão acima percebe-se que a transformada de laplace do deslocamento deve satisfazer a mesma condição. Para tanto, o coeficiente deve ser de modo que anule o comportamento da exponencial cujo argumento é positivo.
A transformada fica dada então pela expressão:
A segunda condição de fronteira permite determinar :
Assim a transformada fica dada por . Para obter a transformada inversa basta utilizar a propriedade do deslocamento:
A função deslocamento encontrada como solução trata-se de nada mais do que um pulso de onda propagando-se no sentido positivo do eixo x (observando um ponto fixo é necessário que, à medida que o tempo aumente, x aumente proporcionalmente para que o argumento da senoide se mantenha constante).
A solução resultade pode ser visualizada na animação abaixo:
Aplicação em problemas com condições de contorno: condução de calor
A condução de calor trata-se da transferência de energia de partículas mais energéticas para as menos energéticas de uma substância devido às interações entre as partículas. Um dos objetivos principais em uma análise da condução é determinar o campo de temperaturas em um meio resultante das condições impostas em suas fronteiras. Ou seja, desejamos conhecer a distribuição de temperaturas, que representa como a temperatura varia com a posição no meio.
É indiscutível que problemas que envolvem aquecimento ou esfriamento de sistemas físicos são muito importantes em várias situações na área de ciência e tecnologia. Algumas soluções dependentes do tempo da equação de difusão do calor podem ser um tanto complicada. Nesse contexto, a Transformada de Laplace surge com uma ótima alternativa para resolver problemas de valores de contorno em problemas de condução de calor.
Um sólido semi-infinito x > 0 que está inicialmente em uma temperatura igual a zero, deseja-se encontrar a temperatura em qualquer ponto do sólido em qualquer tempo, ou seja, u(x, t).
No tempo t = 0, é aplicado e mantido uma temperatura constante uo > 0 na face x = 0. Além disso, iremos considerar a temperatura é constante para todo tempo.
x > 0, t > 0
u(x, 0) = 0
u(0, t) = uo
Aplicando a transformada de Laplace encontramos que:
[1] ou [2]
onde:
Resolvendo [1] encontramos que:
Escolhendo c1 igual a zero de modo que u esteja limitado quanto x tende ao infinito, e então teremos que:
Por [2] teremos que c2 = uo/s, de maneira que:
Pela transformada inversa temos que:
Aplicação em Reações Químicas
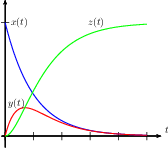
Considere o mecanismo simplificado de reação química apresentado a seguir:
onde a concentração de R, S e T são dadas em mol/l por x(t), y(t) e z(t), respectivamente e são regidas pelo seguinte sistema de equações diferenciais ordinárias:
onde α e γ são constantes positivas. Sabendo que as concentrações iniciais são dadas por:
Usando a teoria das Transformadas de Laplace, vamos obter a solução dada pelas funções x(t), y(t) e z(t) quando α = 1, e γ = 2. Calculamos a Transformada de Laplace do sistema usando a propriedade da linearidade e da derivada:
Da primeira equação, temos:
Da segunda equação, temos:
Da terceira equação temos:
Gráfico das fuções x(t), y(t) e z(t).
Agora, podemos obter as funções x(t), y(t) e z(t) através da Transformada Inversa de Laplace:
onde usamos a propriedade da convolução na passagem da primeira para a segunda liha.
A figura a seguir apresenta o gráfico das funções x(t), y(t) e z(t).
Aplicação no metabolismo de um medicamento
Durante um período de consumo de uma medicação, a concentração da substância ingerida na corrente sanguínea evolui segundo um modelo simples da seguinte forma:
No caso de ausência de dosagens, a variação da concentração é proporcional a concentração.
O organismo metaboliza o medicamento com uma taxa Τ .
As doses de medicamento são liberadas e entra na corrente sanguínea instantaneamente e homogeneamente.
O modelo que descreve esse fenômeno é:
onde é a concentração e representa a dosagem ao longo do tempo . Em geral, as dosagens não são únicas e são tomadas periodicamente. Seja a concentração administrada instantaneamente a cada período Τ, então
Supondo que , ou seja, inicialmente não havia substância no organismo, vamos calcular . Começamos aplicando a transformada de Laplace:
E encontramos:
Calculamos a transformada inversa usando a propriedade do deslocamento no eixo .
Gráfico da função que modela o metabolismo de um medicamento em um organismo
O gráfico da concentração é apresentado na figura ao lado, usando , e .
Outro exemplo: aplicação na física nuclear
Artigo principal: Laplace transform
Como já visto neste artigo, a Transformada de Laplace é uma interessante ferramenta de resolução de problemas de diversas modelagens, auxiliando assim em problemas da física e engenharia, por exemplo, contribuindo para a obtenção de importantes equações.
Decaimento Radioativo
n é o número de núcleos radioativos;
λ é a constante de desintegração;
O número de núcleos que decaem por unidade de tempo é proporcional ao número de núcleos radioativos
Aplicando a Transformada de Laplace, temos:
Aplicando a transformada inversa de Laplace, temos a expressão para o decaimento radioativo
Onde:
n é número de núcleos radioativos remanescentes após um tempo t;
n(0) é número de núcleos radioativos na amostra num tempo t = 0.
Referência
↑«Des Fonctions génératrices» [On generating functions], Théorie analytique des Probabilités [Analytical Probability Theory] (em francês) 2nd ed. , Paris, 1814, chap.I sect.2-20
↑ abcSAUTER, Esequia; AZEVEDO, Fábio; STRAUCH, Irene (15 de maio de 2019). «REAMAT - Transformada de Laplace» (PDF). Universidade Federal do Rio Grande do Sul. Consultado em 20 de dezembro de 2019 !CS1 manut: Nomes múltiplos: lista de autores (link)
↑18-, Williams, John, 1922 April (1973). Laplace transforms. London: Allen & Unwin. ISBN 004512020X. OCLC 3091374
↑K.F. Riley, M.P. Hobson, S.J. Bence (2010), Mathematical methods for physics and engineering, ISBN 978-0-521-86153-3 3rd ed. , Cambridge University Press, p. 455 !CS1 manut: Nomes múltiplos: lista de autores (link)
↑J.J.Distefano, A.R. Stubberud, I.J. Williams (1995), Feedback systems and control, ISBN 0-07-017052-5 2nd ed. , Schaum's outlines, p. 78 !CS1 manut: Nomes múltiplos: lista de autores (link)
↑Mathematical Handbook of Formulas and Tables (3rd edition), S. Lipschutz, M.R. Spiegel, J. Liu, Schuam's Outline Series, p.183, 2009, ISBN 978-0-07-154855-7 - provides the case for real q.



















![{\displaystyle {\mathcal {L}}\{t\}=\left[{\frac {te^{-st}}{-s}}\right]_{0}^{\infty }-\int _{0}^{\infty }{\frac {e^{-st}}{-s}}\,dt}](https://wikimedia.org/api/rest_v1/media/math/render/svg/819472bb9ae3a446d0a4afc16a4f4468df289b7d)
![{\displaystyle \left[{\frac {te^{-st}}{-s}}\right]_{0}^{\infty }+{\frac {1}{s}}\int _{0}^{\infty }{e^{-st}}\,dt}](https://wikimedia.org/api/rest_v1/media/math/render/svg/eeba0f8d87f73ea6d5c8762ee31759b10d5ecc0a)






















![{\displaystyle \ \ \ \ \ \ {\begin{aligned}{\mathsf {Teorema(2):\ }}[Comportamento\ no\ infinito]&{\mathsf {\ Se\ a\ transformada\ de\ Laplace\ de\ uma\ func{\tilde {a}}o\ limitada\ f(t)\ existe,\ F(s)={\mathcal {L}}\{f(t)\},\ ent{\tilde {a}}o}}\\\\lim_{s\to \infty }F(s)=0\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/54ed1c92f39fac3b9a2fa51bf1e2bd68b738a94f)














![{\displaystyle g_{\varepsilon }(t)={\begin{cases}\ \ \ \ \ 1\\{\frac {t}{2\varepsilon }}+{\frac {1}{2}}\\\ \ \ \ \ 0\end{cases}}\ \ \ {\begin{aligned}&caso\ (\varepsilon ,\ \infty )\supset t\\&caso\ [-\varepsilon ,\ \varepsilon ]\supset t\\&caso\ (-\infty ,\ -\varepsilon )\supset t\end{aligned}}\ \ \ \ {\mathsf {para\ \ \epsilon \ll 1}}\ \ .}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e4fa8c7d1ceb0100541a4f132ba9f92da5e68790)








































 Ver artigo principal: Lista de propriedades da transformada de Laplace
Ver artigo principal: Lista de propriedades da transformada de Laplace
![{\displaystyle {\mathcal {L}}\{\alpha f(t)+\beta g(t)\}\ {\overset {=}{\ }}\int _{0}^{\infty }[\alpha f(t)+\beta g(t)]\ e^{-st}\operatorname {d} \!t\ \ \ \ {=}\ \int _{0}^{\infty }\alpha f(t)\ e^{-st}\operatorname {d} \!t\ +\ \int _{0}^{\infty }\beta g(t)\ e^{-st}\operatorname {d} \!t\ \ \ \ {=}\ \alpha \int _{0}^{\infty }f(t)\ e^{-st}\operatorname {d} \!t\ +\ \beta \int _{0}^{\infty }g(t)\ e^{-st}\operatorname {d} \!t\ }](https://wikimedia.org/api/rest_v1/media/math/render/svg/a2e7b96bb305c2d616ef2afd3153a11941b6a082)








![{\displaystyle [0,\infty ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/52088d5605716e18068a460dec118214954a68e9)





![{\displaystyle {\begin{aligned}{d \over dx}F(s)&={d \over ds}\int _{0}^{\infty }f(t)e^{-st}dt\\[4pt]&=\int _{0}^{\infty }f(t){d \over ds}(e^{-st})dt\\[4pt]&=\int _{0}^{\infty }f(t)(-t)e^{-st}dt\\[4pt]&=-\int _{0}^{\infty }{tf(t)e^{-st}dt}\\[4pt]&=-{\mathcal {L}}{tf(t)}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/858337364a15cea938c61e110bd9363975f106ce)

![{\displaystyle {\begin{aligned}{\hat {f}}(\omega )&={\mathcal {F}}\{f(t)\}\\[4pt]&={\mathcal {L}}\{f(t)\}|_{s=i\omega }=F(s)|_{s=i\omega }\\[4pt]&=\int _{-\infty }^{\infty }e^{-i\omega t}f(t)\,dt~.\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/44fd8f6a7374f8e3ae9b00c7ca0107108784f9cd)



![{\displaystyle {\begin{aligned}\int _{s}^{\infty }F(v)\,dv&=\int _{s}^{\infty }{\biggl (}\int _{0}^{\infty }f(t)e^{-vt}dt{\biggr )}dv\\\int _{s}^{\infty }F(v)\,dv&=\int _{s}^{\infty }f(t){\biggl (}\int _{0}^{\infty }e^{-vt}dv{\biggr )}dt\\\int _{s}^{\infty }F(v)\,dv&=\int _{s}^{\infty }f(t)\left[{\frac {e^{-vt}}{-t}}\right]_{s}^{\infty }dt\\\int _{s}^{\infty }F(v)\,dv&=\int _{0}^{\infty }{\frac {f(t)}{t}}e^{-st}dt\\\int _{s}^{\infty }F(v)\,dv&={\mathcal {L}}\left\{{\frac {f(t)}{t}}\right\}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1227148528c92b16e20f4b8cce8099a3a5691ee5)



















![{\displaystyle {\sqrt[{n}]{t}}\cdot u(t)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d4345a4c33a88daeb8ec5a3002d02d62f66ff3fb)


























![{\displaystyle -{1 \over s}\,\left[\ln(s)+\gamma \right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/443e300447c3c06d1a0fe2dd051073dba815ee08)









![{\displaystyle V=L\left[sI-i\left(0^{-}\right)\right]=sLI-LI_{0}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/69a769791029ed8ca9ab3170dc24c884568a3982)



![{\displaystyle I=C\left[sV-v\left(0^{-}\right)\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e343110bbd3df9ba008c8213592b6c87e7616d90)
















![{\displaystyle {\Big ]}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3562ad363226e09873d4861d879d5d4116de3287)















![{\displaystyle {\mathcal {L}}\left\{J_{0}(at)\right\}{=}{\frac {1}{s}}\left[1-{\frac {1}{2}}\left({\frac {a}{s}}\right)^{2}+{\frac {1}{2}}\cdot {\frac {3}{2}}\cdot {\frac {1}{2!}}\left({\frac {a}{s}}\right)^{4}-{\frac {1}{2}}\cdot {\frac {3}{2}}\cdot {\frac {5}{2}}\cdot {\frac {1}{3!}}\left({\frac {a}{s}}\right)^{6}+...\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7ca0a867cd99a9da8e2cec2ee1546429013a85dd)














































![{\displaystyle i(t)={\mathcal {L^{-1}}}\left\{{\frac {Vo}{R}}{\frac {1}{s+{\frac {1}{RC}}}}{\bigl (}e^{-as}-e^{-bs})\right\}={\frac {Vo}{R}}{\Biggl (}{\mathcal {L^{-1}}}\left\{{\frac {1}{s+{\frac {1}{RC}}}}e^{-as}\right\}-{\mathcal {L^{-1}}}\left\{{\frac {1}{s+{\frac {1}{RC}}}}e^{-bs}\right\}{\Biggr )}={\frac {Vo}{R}}[u(t-a)e^{-{\frac {(t-a)}{RC}}}-u(t-b)e^{-{\frac {(t-b)}{RC}}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ed6912443e4fbae2284ae75e2b8327baae753a56)



















































































![{\displaystyle {\begin{cases}sin(t),&t\in [0,2\pi ]\\0&{\mbox{caso contrário}}\end{cases}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/95fae2773c6f84e6c450077de3661f6c2736c05c)




























































 Portal da matemática
Portal da matemática








