Derivada
| Cálculo |
|---|
|
| Definições
Conceitos
Tabela de derivadas
|
| Cálculo integral Definições
Integração por
|
| Série |
| Cálculo especializado
|
|
No cálculo, a derivada em um ponto de uma função representa a taxa de variação instantânea de em relação a neste ponto. Um exemplo típico é a função velocidade que representa a taxa de variação (derivada) da função espaço. Do mesmo modo, a função aceleração é a derivada da função velocidade. Geometricamente, a derivada no ponto de representa a inclinação da reta tangente ao gráfico desta função no ponto .[1][2] A função que a cada ponto associa a derivada neste ponto de é chamada de função derivada de f(x).








Notação
Duas distintas notações são comumente utilizadas para a derivada, o resultante de Leibniz e o outro a partir de Joseph Louis Lagrange.
Na notação de Leibniz, uma mudança infinitesimal em x é denotada por dx, e a derivada de y em relação a x é escrito .

sugerindo que a razão de duas quantidades infinitesimais (A expressão acima é lido como "a derivada de y em relação a x", "dy por dx", ou "dy sobre dx". A forma oral dydx é usado frequentemente em tom de conversa, embora possa levar à confusão).
Na notação de Lagrange, a derivada em relação a x de uma função F(x) é denotada f'(x) ou fx'(x), em caso de ambiguidade da variável implicada pela derivação. A notação de Lagrange é por vezes incorretamente atribuída a Newton.
Definição

Seja um intervalo aberto não-vazio e seja , , uma função de em . Diz-se que função é derivável no ponto se existir o seguinte limite:[3]




- .

Se for esse o caso, o número real é chamado de derivada da função no ponto . Notações equivalentes são:



.

Equivalentemente, escrevemos:

o que é obtido fazendo no limite acima. Desta forma, define-se a função derivada de por:


para todo para o qual este limite existe.
Uma função é dita derivável (ou diferenciável) quando sua derivada existe em cada ponto do seu domínio.
| Segundo esta definição, a derivada de uma função de uma variável é definida como um processo de limite. Considera-se a inclinação da secante, quando os dois pontos de intersecção com o gráfico de f convergem para um mesmo ponto. No limite, a inclinação da secante é igual à da tangente. |  |  |
Seja f uma função real definida em uma vizinhança aberta de um número real a.
Na geometria clássica, a linha tangente ao gráfico da função f em a foi a única linha que passou pelo ponto (a, f(a)) que não encontrou o gráfico de f transversalmente, significando que a linha não passou diretamente pelo gráfico.
O declive da secante ao gráfico de f, na imagem acima, que passa pelos pontos (x,f(x)) e (x + h,f(x + h)) é dado pelo quociente de Newton:
- .

Uma definição alternativa é: a função f é derivável em a se existir uma função φa de I em R contínua em a tal que
- .

Então define-se a derivada de f em a como sendo φa(a).
Funções com valores em R

Se for um intervalo de com mais do que um ponto e se for uma função de em , para algum número natural , as definições anteriores continuam a fazer sentido. Assim, por exemplo a função


- (ou seja: uma função que a cada x do domínio em responde com uma coordenada no contradomínio em . Esta coordenada é .


é derivável e


De fato, as propriedades acima descritas para o caso real continuam válidas, exceto, naturalmente, as que dizem respeito à monotonia de funções.
Diferenciabilidade
Derivabilidade num ponto
- Seja um intervalo de R com mais do que um ponto, seja ∈ e seja uma função de em R derivável em . Então é contínua em . O recíproco não é verdadeiro, como se pode ver pela função módulo.
- Seja um intervalo de R com mais do que um ponto, seja ∈ e sejam e funções de em R deriváveis em . Então as funções ± , e (caso ≠ ) também são deriváveis em e:








Em particular, se ∈ R, então . Resulta daqui e de se ter que a derivação é uma aplicação linear.



- Sejam e intervalos de R com mais do que um ponto, seja ∈ , seja uma função de em derivável em e seja seja uma função de em R derivável em . Então o é derivável em e


- .

Esta propriedade é conhecida por regra da cadeia.
- Seja um intervalo de R com mais do que um ponto, seja ∈ e seja uma função contínua de em R derivável em com derivada não nula. Então a função inversa é derivável em e


Outra maneira de formular este resultado é: se está na imagem de e se for derivável em com derivada não nula, então


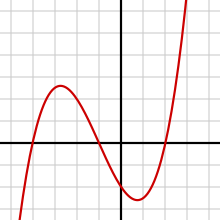
Assim, por exemplo, se considerarmos a função f de R em R definida por f(x) = x² + x − 1, esta é diferenciável em 0. Podem ver-se na imagem abaixo os gráficos das restrições daquela função aos intervalos [−1,1] e [−1/10,1/10] e é claro que, enquanto que o primeiro é bastante curvo (e, portanto, f(x) − f(0) está aí longe de ser linear), o segundo é praticamente indistinguível de um segmento de reta (de declive 1). De facto, quanto mais se for ampliando o gráfico próximo de (0,f(0)) mais perto estará este de ser linear.

Em contrapartida, a função módulo de R em R não é derivável em 0, pois, por mais que se amplie o gráfico perto de (0,0), este tem sempre o aspecto da figura abaixo.

Derivabilidade em todo o domínio
Diz-se que f é derivável ou diferenciável se o for em todos os pontos do domínio.
- Uma função derivável de em R é constante se e só se a derivada for igual a em todos os pontos. Isto é uma consequência do teorema da média.
- Uma função derivável de em R é crescente se e só se a derivada for maior ou igual a em todos os pontos. Isto também é uma consequência do teorema da média.
Uma função cuja derivada seja sempre maior que é estritamente crescente. Uma observação importante é que existem funções estritamente crescentes em que a derivada assume o valor em alguns pontos. É o que acontece, por exemplo com a função de R em R definida por . Naturalmente, existem enunciados análogos para funções decrescentes.

- Se for uma função derivável de em R, sendo um intervalo de R com mais do que um ponto, então também é um intervalo de R. Outra maneira de formular este resultado é: se for uma função derivável de em R e se for um número real situado entre e (isto é, ≤ ≤ ou ≥ ≥ ), então existe algum ∈ tal que . Este resultado é conhecido por teorema de Darboux.

![{\displaystyle [a,b]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9c4b788fc5c637e26ee98b45f89a5c08c85f7935)


Funções continuamente deriváveis
Seja um intervalo de R com mais do que um ponto e seja uma função de em R. Diz-se que é continuamente derivável ou de classe se for derivável e, além disso, a sua derivada for contínua. Todas as funções deriváveis que foram vistas acima são continuamente deriváveis. Um exemplo de uma função derivável que não é continuamente derivável é


pois o limite não existe; em particular, f' não é contínua em .

Derivadas de ordem superior
Quando obtemos a derivada de uma função o resultado é também uma função de x e como tal também pode ser diferenciada. Calculando-se a derivada novamente obtemos então a segunda derivada da função f. De forma semelhante, a derivada da segunda derivada é chamada de terceira derivada e assim por diante. Podemos nos referir às derivadas subsequentes de f por:

e assim sucessivamente. No entanto, a notação mais empregada é:

ou alternativamente,

ou ainda

Se, para algum k ∈ N, f for k vezes derivável e, além disso, f(k) for uma função contínua, diz-se que f é de classe Ck.
Se a função f tiver derivadas de todas as ordens, diz-se que f é infinitamente derivável ou indefinidamente derivável ou ainda de classe C∞.
Exemplos
Se ∈ R, a função de R em R definida por é derivável em todos os pontos de R e a sua derivada é igual a em todos os pontos, pois, para cada ∈ R:

- .

Usando a definição alternativa, basta ver que se se definir de R em R por , então é contínua e, para cada e cada reais, tem-se


- ;

além disso, .

A função de R em R definida por é derivável em todos os pontos de R e a sua derivada é igual a em todos os pontos, pois, para cada ∈ R:


- .

Usando a definição alternativa, basta ver que se se definir de R em R por , então é contínua e, para cada e cada reais, tem-se

- ;

além disso, .

A função de R em R definida por é derivável em todos os pontos de R e a sua derivada no ponto ∈ R é igual a , pois:


- .

Usando a definição alternativa, basta ver que se se definir de R em R por , então é contínua e, para cada e cada reais, tem-se

- ;

além disso, .

A função módulo de R em R não é derivável em pois

No entanto, é derivável em todos os outros pontos de R: a derivada em é igual a quando e é igual a quando .



Ponto de inflexão
Um ponto em que a segunda derivada de uma função muda de sinal é chamado de um ponto de inflexão. Em um ponto de inflexão, a segunda derivada pode ser zero, como no caso do ponto de inflexão x = 0 da função y = x³, ou ele pode deixar de existir, como é o caso do ponto de inflexão x = 0 da função y = . Em um ponto de inflexão, uma função convexa passa a ser uma função côncava, ou vice-versa.

Pontos críticos, estacionários ou singulares
 Ver artigo principal: Ponto crítico
Ver artigo principal: Ponto críticoPontos onde a derivada da função é igual a chamam-se normalmente de pontos críticos. Existem cinco tipos de pontos onde isto pode acontecer em uma função. Como a derivada é igual ao declive da tangente em um dado ponto, estes pontos acontecem onde a reta tangente é paralela ao eixo dos . Estes pontos podem acontecer:
- onde a função atinge um valor máximo e depois começa a diminuir, chamados máximos locais da função
- onde ela atinge um valor mínimo e começa a aumentar, chamados de mínimos locais da função
- em pontos de inflexão (horizontais) da função, que ocorrem onde a concavidade da função muda. Um exemplo típico é a função : no ponto a função tem um ponto de inflexão (horizontal).
- em pontos onde a função oscila indefinidamente entre valores acima ou abaixo, um exemplo típico é a função
- em pontos onde a função é localmente constante, ou seja, existe um intervalo contendo o ponto para o qual a restrição da função ao intervalo é a função constante. Um exemplo típico é a função f(x) = |x + 1| + |x - 1| no ponto x=0.


Os pontos críticos são ferramentas úteis para examinar e desenhar gráficos de funções.
Derivadas notáveis
Ver artigo principal: Tabela de derivadasA derivada de uma função pode, em princípio, ser calculado a partir da definição, considerando o quociente de diferença, e computar o seu limite. Na prática, uma vez que as derivadas de algumas funções simples são conhecidos, as derivadas de outras funções são mais facilmente calculado usando regras para a obtenção de derivadas de funções mais complicadas das mais simples.
A maioria dos cálculos de derivadas, eventualmente, exige a tomada da derivada de algumas funções comuns. A seguinte lista incompleta é de algumas das funções mais frequentemente utilizadas de uma única variável real e seus derivados.
Alguns exemplos de derivadas notáveis são:
- A função exponencial natural y = ex = exp(x) cuja derivada é igual a si mesma, isto é:

- A função logaritmo natural y = ln(x):

Estes dois fatos não são independentes. De fato, como o logaritmo natural é a inversa da função exponencial, resulta da igualdade e da fórmula para a derivada da inversa que


Reciprocamente, supondo-se que, para cada , , então



- Também são notáveis as derivadas das funções trigonométricas:






- E funções Funções trigonométricas inversas:



Neste último caso, as derivadas resultam das fórmulas para as derivadas das funções trigonométricas juntamente com a fórmula para a derivada da inversa e a fórmula fundamental da trigonometria.
Regras para funções combinadas
Em muitos casos, a aplicação direta do quociente de diferença de Newton pode ser evitado usando regras de diferenciação, evitando complicados cálculos de limite. Algumas das regras mais básicas são as seguintes:
- Regra da constante: se f(x) é constante, então:

- Regra da soma:

para todas as funções f e g e todos os números reais e



para todas as funções f e g. Por conseguinte, isso significa que a derivada de uma constante vezes uma função é a constante vezes a derivada da função


para todas as funções f e g, em que g ≠ 0.
Se

então:

Exemplo de uso
A derivada de

é

As derivadas conhecidas de funções elementares sen(x) e , assim como a constante 7, também foram usadas.


Funções de uma variável complexa
Se A for um conjunto de números complexos, se f for uma função de A em C e se a for um ponto não isolado de A (isto é, se tão perto quanto se queira de a houver outros elementos de A), então as duas definições da derivada de f no ponto a continuam a fazer sentido. De facto, as propriedades acima descritas para o caso real continuam válidas, excepto, mais uma vez, as que dizem respeito à monotonia de funções.
Física
Uma das mais importantes aplicações da Análise à Física (senão a mais importante), é o conceito de derivada temporal — a taxa de mudança ao longo do tempo — que é necessária para a definição precisa de vários importantes conceitos. Em particular, as derivadas temporais da posição s de um objecto são importantes na física newtoniana:
- Velocidade (velocidade instantânea; o conceito de velocidade média é anterior à Análise) v é a derivada (com respeito ao tempo) da posição do objeto.
- Aceleração a é a derivada (com respeito ao tempo) da velocidade de um objecto.
Posto de outro modo:

Por exemplo, se a posição de um objecto é s(t) = −16t² + 16t + 32, então a velocidade do objecto é s′(t) = −32t + 16 e a aceleração do objecto é s′′(t) = −32. Uma forma de enunciar a segunda lei de Newton é F = dp/dt , sendo p o momento linear do objecto.
Derivadas em maiores dimensões
Em dimensão 1, as derivadas são pensadas como números pois, nesta dimensão, um número e uma transformação linear são a mesma coisa. Entretanto, para dimensões maiores, as derivadas necessitam ser tratadas como transformações lineares.[4]
Derivadas de funções vetoriais
Uma função vetorial y(t) de uma variável real de uma variável real envia números reais de vetores em algum espaço vetorial. A função vetorial pode ser dividido em suas funções coordenadas y1(t), y2(t),...,yn(t), significando que y(t) = ( (t), ..., (t)). Isto inclui, por exemplo, curvas paramétricas em R² ou R³.



As funções de coordenadas são funções de valores reais, de modo que a definição acima de derivada aplica-se a eles. A derivada de y (t) é definida como sendo o vetor, chamado o vetor tangente, cujas coordenadas são as derivadas das funções de coordenadas. Isto é,

equivalentemente,
se o limite existe.

A subtração no numerador é a subtração de vetores, não escalares. Se a derivada de y existe para cada valor de t, então y' é outra função vetorial.
Se , ..., é a base padrão para , então y (t) também pode ser escrito como (t) + ... + (t). Se assumirmos que a derivada de uma função vetorial mantém a propriedade da linearidade, então a derivada de y (t) deve ser



porque cada um dos vetores de base é uma constante.
Esta generalização é útil, por exemplo, se y (t) é o vetor de posição de uma partícula no tempo t; em seguida, o derivado y '(t) é o vetor de velocidade da partícula no tempo t.
Derivadas parciais
Ver artigo principal: Derivada parcialQuando uma função depende de mais do que uma variável, podemos usar o conceito de derivada parcial. Podemos entender as derivadas parciais como a derivada de uma função para uma determinada variável, enquanto as outras se mantêm fixadas. No gráfico, é usada para determinar a variação da função em um determinado eixo. Derivadas parciais são representadas como, por exemplo, ∂z/∂x, sendo x a variável fixada sobre uma função em z.
Suponha que f é uma função que depende mais de uma variável, por exemplo,

f pode ser reinterpretado como uma família de funções de uma variável indexada pelas outras variáveis:

Em outras palavras, cada valor de x escolhe uma função, denotando , que é uma função de um número real. Ou seja,



Uma vez que um valor de x é escolhido, digamos a, então f(x,y) determina a função que envia y a a2+ay+y2:


Nesta expressão, a é uma constante, e não uma variável, de modo que é uma função de uma única variável real. Consequentemente, a definição da derivada para uma função de uma variável aplica-se:

O procedimento acima pode ser realizada por qualquer escolha de a. Montando as derivadas juntas em uma função, dá uma função que descreve a variação de f na direção y:

Esta é a derivada parcial de f em relação a y. Aqui, ∂ é o símbolo derivada parcial.
Em geral, a derivada parcial de uma função f (, ..., ) na direção de , no ponto ( ..., ) é definido como sendo:






Na diferença de quociente acima, todas as variáveis, exceto , são mantidos fixos. Essa escolha de valores fixos determina uma função de uma variável.
{

e por definição,

Em outras palavras, as diferentes opções de classificar uma família de funções de uma variável tal como no exemplo acima. Esta expressão também mostra que o cálculo das derivadas parciais reduz para o cálculo dos derivados de uma variável.
Um exemplo importante de uma função de várias variáveis é o caso de uma função de valor escalar f (, ..., ) em um domínio no espaço Euclidiano (por exemplo, em R² ou R²). Neste caso, f tem uma derivada parcial ∂f / ∂xj em relação a cada variável . No ponto a, estas derivadas parciais definem o vetor


Este vetor é denominado gradiente de f em a. Se f é diferenciável em todos os pontos em algum domínio, então o gradiente é uma função vetorial ∇f que leva o ponto a para o vetor ∇f(a).
Consequentemente, o gradiente determina um campo vetorial.
Derivadas direcionais
Se f é uma função com valores reais em , então a derivada parcial de f mede a sua variação na direção dos eixos das coordenadas. Por exemplo, se f é uma função de x e y, então sua derivada parcial mede a variação em f na direção x e na direção y. Contudo, elas (derivadas parciais) não medem diretamente a variação de f em qualquer outra direção, tal como aquela ao longo da linha diagonal y=x. Estas são medidas usando-se as derivadas direcionais. Escolha um vetor:

A derivada direcional de f na direção de v no ponto x é o limite

Em alguns casos pode ser mais fácil computar ou estimar a derivada direcional depois de mudar o comprimento do vetor. Frequentemente isso é feito para transformar o problema numa computação de uma derivada direcional na direção de um vetor unitário. Para ver como isso funciona, suponha v = λu. Substitua h = k/λ no quociente da diferença.
O quociente da diferença torna-se:

Isso é λ vezes o quociente da diferença para a derivada direcional de f no que diz respeito a u. Além disso, tomar o limite como h tendendo a zero é o mesmo que tomar o limite como k tendendo a zero, pois h e k são múltiplos um do outro.
Portanto, Dv(f) = λDu(f). Devido a essa propriedade de redirecionamento, derivadas direcionais são frequentemente consideradas apenas para vetores unitários.
Se todas as derivadas parciais de f existem e são contínuas em x, então elas determinam a derivada direcional de f na direção de v pela fórmula:

Essa é a consequência da definição de derivada total. Diz-se que a derivada direcional é linear em v, significando que D + (f) = D(f) + D(f).


A mesma definição também é aplicável quando f é a função com valores em . . A definição acima é aplicada a cada componente dos vetores. Nesse caso, a derivada direcional é um vetor em .

Derivadas de aplicações
Sejam um aberto de , e uma função. Dizemos que é diferenciável quando existem uma transformação linear e uma função dada por tais que







.

Neste caso, a aplicação é chamada de derivada da função no ponto e denotada por . Em outras palavras




Exemplos
- Se , e , então
- Se , e então
- Se , e então
- Se , e então












Nesta definição, podemos considerar a derivada parcial de uma aplicação como sendo

Podemos repensar nessa igualdade. Se observarmos que corresponde à -ésima coordenada de e que a -ésima coordenada de é segue que





Referências
- ↑ STEWART, James. Curso de cálculo volume 1. São Paulo: Pioneira Thomson Learning, 2002. 4ªa edição. ISBN 85-221-0236-8. Página 159.
- ↑ Anton, Howard (2009). Cálculo - Volume 1 8 ed. [S.l.]: Bookman. ISBN 9788560031634
- ↑ STEWART, James. Curso de cálculo volume 1. São Paulo: Pioneira Thomson Learning, 2002. 4ªa edição. ISBN 85-221-0236-8. Página 156.
- ↑ Lima 1981, Prefácio.
Bibliografia
- Agudo, F. R. Dias, Análise Real (3 volumes), Lisboa: Escolar Editora, 1994
- Lima, Elon Lages (1981). Curso de análise, Volume 2. Instituto de Matemática Pura e Aplicada. Rio de Janeiro: Instituto de Matemática Pura e Aplicada
- Ostrowski, A., Lições de Cálculo Diferencial e Integral (3 volumes), Lisboa: Fundação Calouste Gulbenkian, 1981
- Ricieri, A. P., Derivada Fracionária, Transformada de Laplace e outros bichos, Prandiano, 1993, S. José dos Campos - SP - Brasil.
Ver também
- Cálculo Diferencial e Integral
- Cálculo fracionário
- Derivada simétrica, Diferenciação automática, Diferenciação numérica
- Diferintegral
- Classe de diferenciabilidade
- Linearização
- Tabela de derivadas
- Técnicas para diferenciação
Ligações externas
- «Rei da Derivada - Torneio inventado pelo prof. Ricardo Fragelli para ensino de derivadas»
- «Cálculo diferencial para funções trigonométricas» (PDF)
- «tese de Engenharia Mecânica aplicando derivadas fracionárias» (PDF)
- «Equações generalizadas de difusão (aplica derivadas parciais fracionárias)»
- «Calcular derivada passo a passo»
Funções | ||
|---|---|---|
| Tipos | Analítica • Bijetora • Convexa • Divisor • Elementar • Exponencial • Fatorial • Identidade • Inclusão • Inteira • Inversa • Iterada • Limitada • Integral de Tchebychev • Logaritmo • Logaritmo natural • Monótona • Parcial • Polinomial • Retangular • Simples • Sinal • Sobrejetora • Suave |  |
| Trigonométricas | ||
| Hiperbólicas | ||
| Famosas | ||
| Conceitos | Assimptota/Assíntota • Curva • Derivada • Espaço funcional • Espaço Lp • Gráficos • Integral • Limite • Injectividade • Parte inteira • Primitiva • Projeção • Reta | |
| Funções em economia | ||
| Controle de autoridade |
|---|
 Portal da matemática
Portal da matemática










